![[Navigation] TF, URDF](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FcOk1BY%2FbtscPcUj3qP%2FQ4hcCXTWaYq1UbZGo7wNGK%2Fimg.png)

Robotics를 구성하기 위해서는 먼저 Model에 대한 생성과 정의가 필요하다.
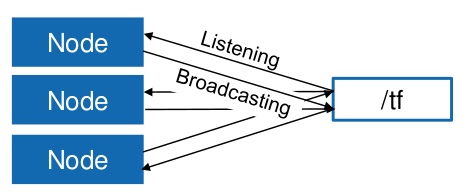
정의 : 시간에 따른 3D coordinate frames의 변화들을 Tracking하기 위한 방법
tf에 대한 이해를 위해 ROSWiki의 예제를 이용해보자.
sudo apt-get install ros-noetic-ros-tutorials ros-noetic-geometry-tutorials ros-noetic-rviz ros-noetic-rosbash ros-noetic-rqt-tf-tree
Unified Robot Description Format(URDF)
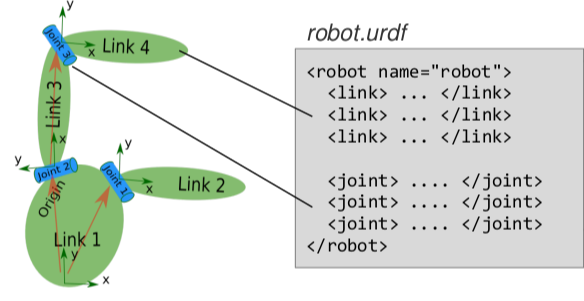
- 로봇 모델에 대한 정의로 XML 포맷으로 정의
- Kinematic/Dynamic description
- Visual representation
- Collision model
Joint : Link와 Link를 연결하는 역할
Simulation Description Format(SDF) <- Standard format for Gazebo
- XML format으로 정의 (Environments, Objects, Sensors, Robots)
- GAZEBO에서는 URDF를 SDF로 자동 변환
728x90
'Learning Space > ROS' 카테고리의 다른 글
| [ROS 1 NOTE] ROS Packages (0) | 2023.05.01 |
|---|---|
| [ROS 1 NOTE] Basis of ROS (0) | 2023.05.01 |
| [GAZEBO] AR TAG (2) | 2023.03.23 |
| [ROS1 NOTE] mavros_msgs.srv (0) | 2023.03.13 |
| [ROS1 NOTE] mavros_msgs.msg (0) | 2023.02.25 |